
Abstract: 数字图像处理:第10天
Keywords: 形态学,腐蚀,膨胀,边缘
开篇废话
今天来介绍形态学中最基础也是最重要的两个操作,腐蚀和膨胀,腐蚀和膨胀基本上是所有形态学操作的基础,除此之外还有补集(即二值图全部取反的操作,0变1,1变0),和反射(将所有坐标去反)。
之前使用过腐蚀和膨胀,仅仅是去噪,那时候连结构元(SE)的概念都没有,其实所有形态学操作,核心都是结构元(包括其形状和中心位置,中心位置可以不在结构元区域中),他的变化可以产生千奇百怪的效果,如果你能很好的设计结构元,那么你将能得到你想要的效果。
对于写博客,我觉得坚持下来还是不错的,一是可以反思总结一下学习结果,很多收获都是写博客的时候想到的,虽然写起来浪费很多时间,包括作图之类的工作。二是可以作为资料,以后查看,查漏补缺。三是与别人分享知识,如果有问题,可以有人及时指正,良师益友。
应用
腐蚀和膨胀的应用应该很多,因为其操作简单,属于基础运算,这里简单列举下用途,还是那句话,SE是关键,设计好了可以处理很多二值图像的问题。
膨胀:
- 桥接缝隙(缝隙点为0,且宽度比SE的宽度小)
- 消除细小的黑点(二值图像中的0,黑点比SE小)
腐蚀:
- 消除“桥梁”(细线装的白色条纹,值为1,宽度小于SE的宽度)
- 消除细小的白点(二值图像中的1,白点比SE小)
此外,经过组合,腐蚀和膨胀将完成基本全部的形态学操作,例如后面介绍的,开操作,闭操作,命中与不命中,提取边缘,提取骨骼,裁剪等等。
数学基础
数学形态学的数学基础是集合论,Milan Sonka etc.的《图像处理、分析与机器视觉》(以下简称IPAMV)中提到的一篇论文【Serra,1982】(此文在结尾附下载地址,版权归IEEE所有,请勿用于商业用途),文中给出了数学形态学的基本操作,和定义,如下:
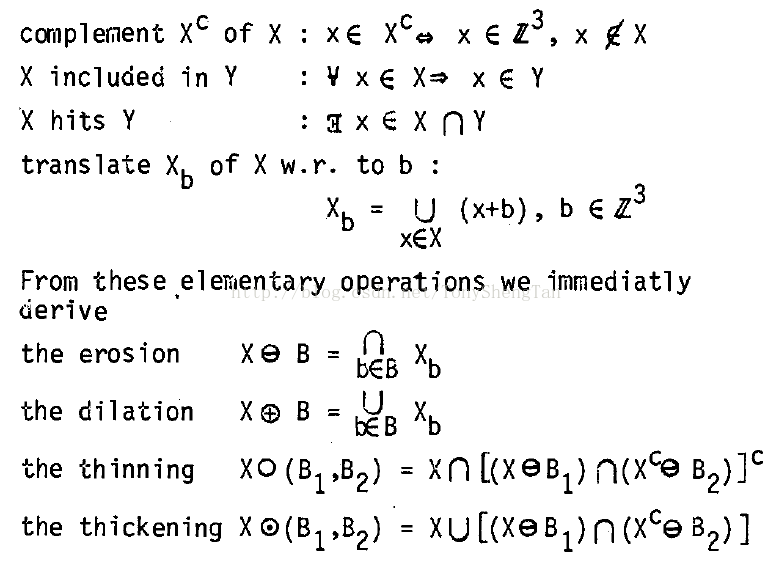
上图给出了最基本的腐蚀和膨胀操作,以及平移操作,由于上图中,英文较为简单,这里不再过多的解释,基本操作都是集合操作,如,交并补集操作。
首先,我在看这篇文章之前,对于腐蚀膨胀一直停留在SE划过窗口的模式,也就是,SE在图像上扫描,满足某些条件时进行某些操作,但这么做的问题在于,如果SE比窗口大,按照上述将无法操作,而且,我们无法验证膨胀的交换不变性,A膨胀B=B膨胀A,因为除非A,B大小相等,否者大的无法在小的上滑动。
而文中的标准定义是,对图像X进行移动,包括 $b_1,b_2,b_3,b_4\dots b_n$ 即集合B中的所有移动的结构的并集,换句话说,就是集合A使用SE,B集合在膨胀,等于B的子集分别腐蚀的并集(子集的并集等于B)。
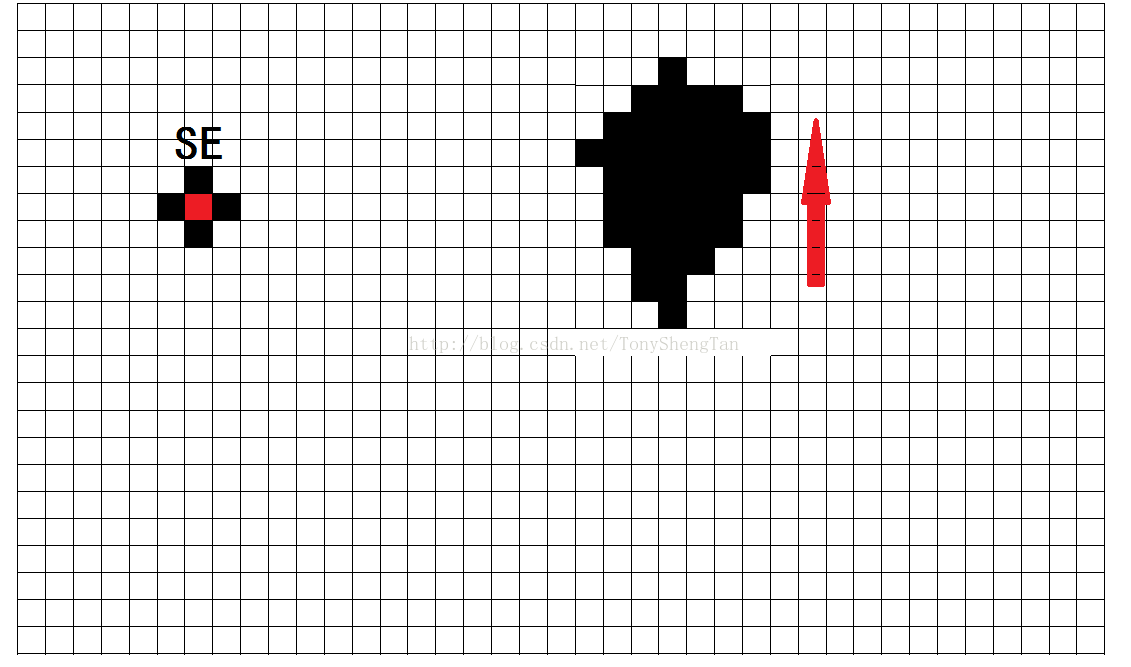
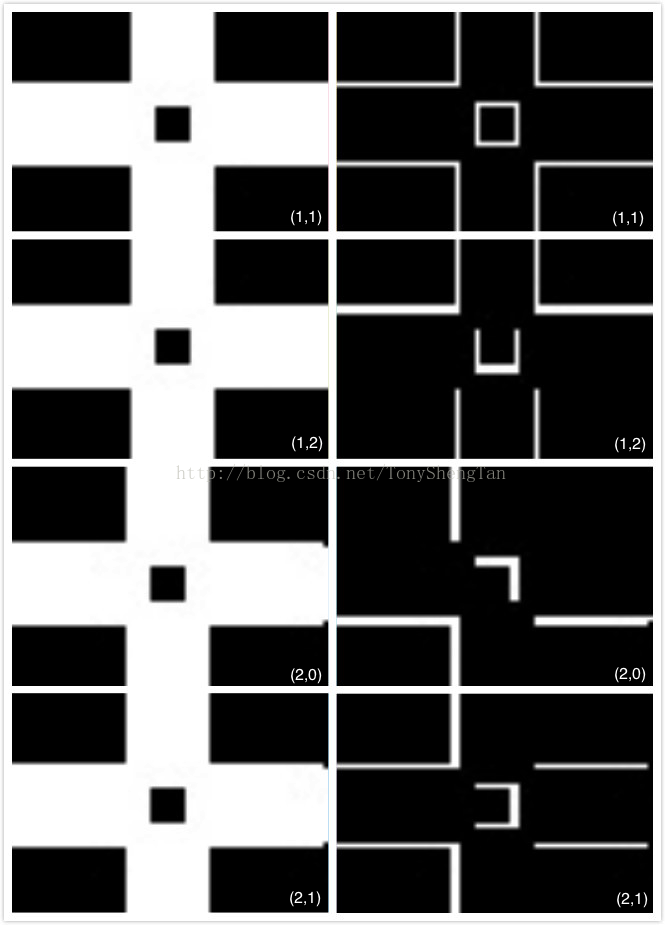
上图,做了好久的图:
STEP1:首先观察左侧SE,红色为中心,和明显,SE具有各向同性,这也是一个结构元的重要特点,即各向同性与各向异性有不同的效果,也有不同的应用。
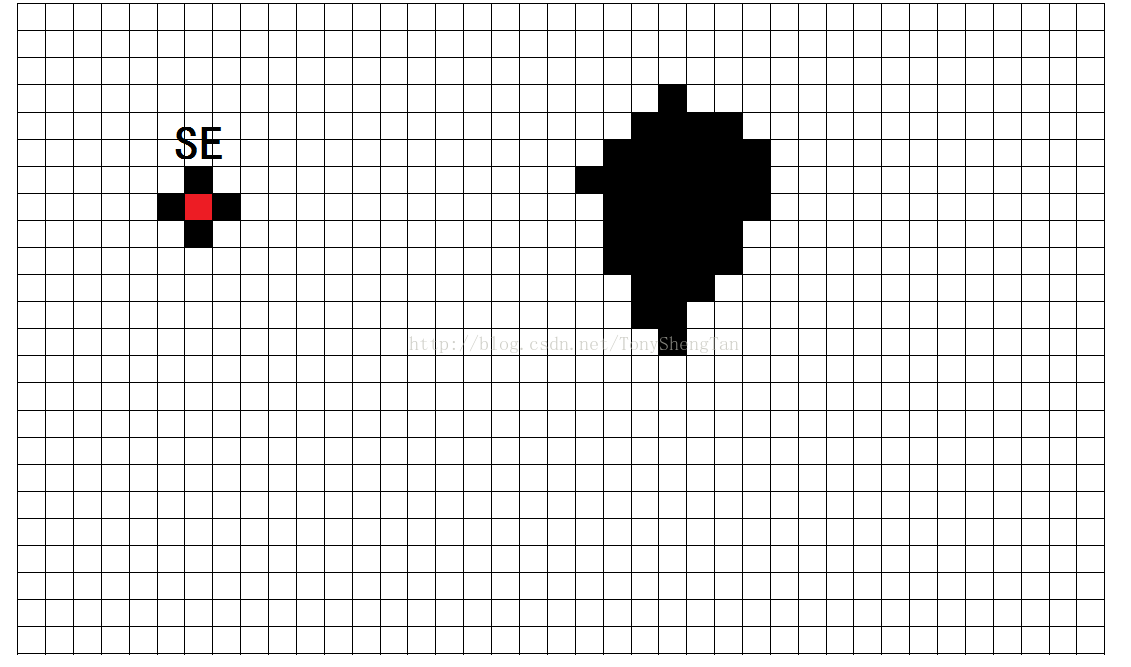
STEP2:SE显示,集合X需要向左移1个单位。
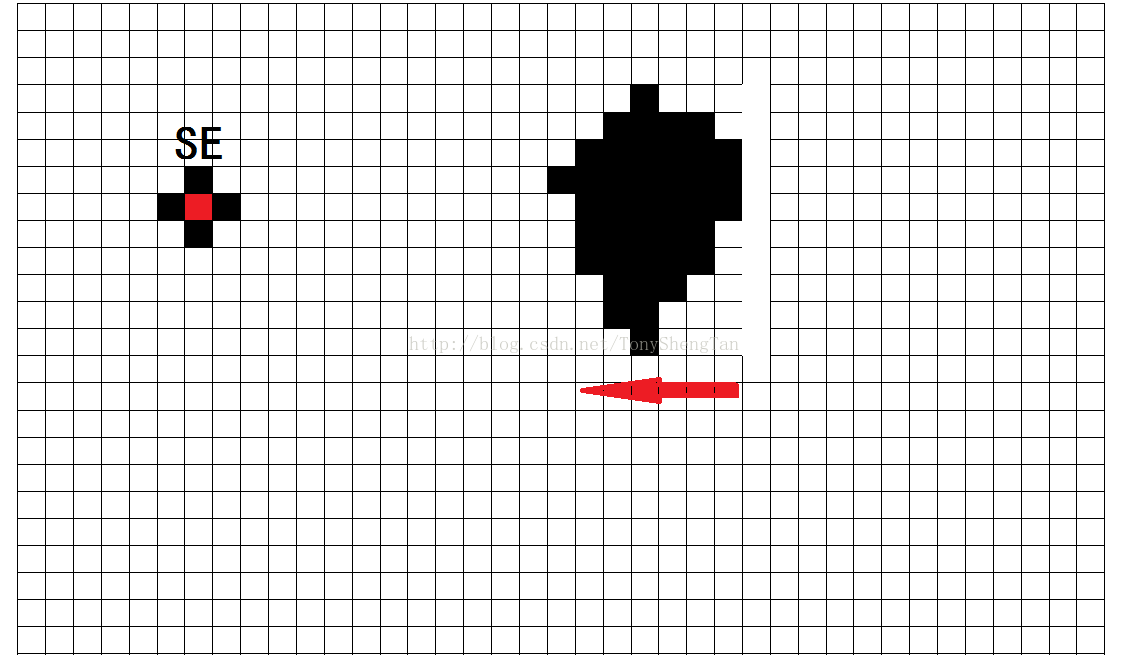
STEP3:SE显示,集合X需要向右移1个单位。
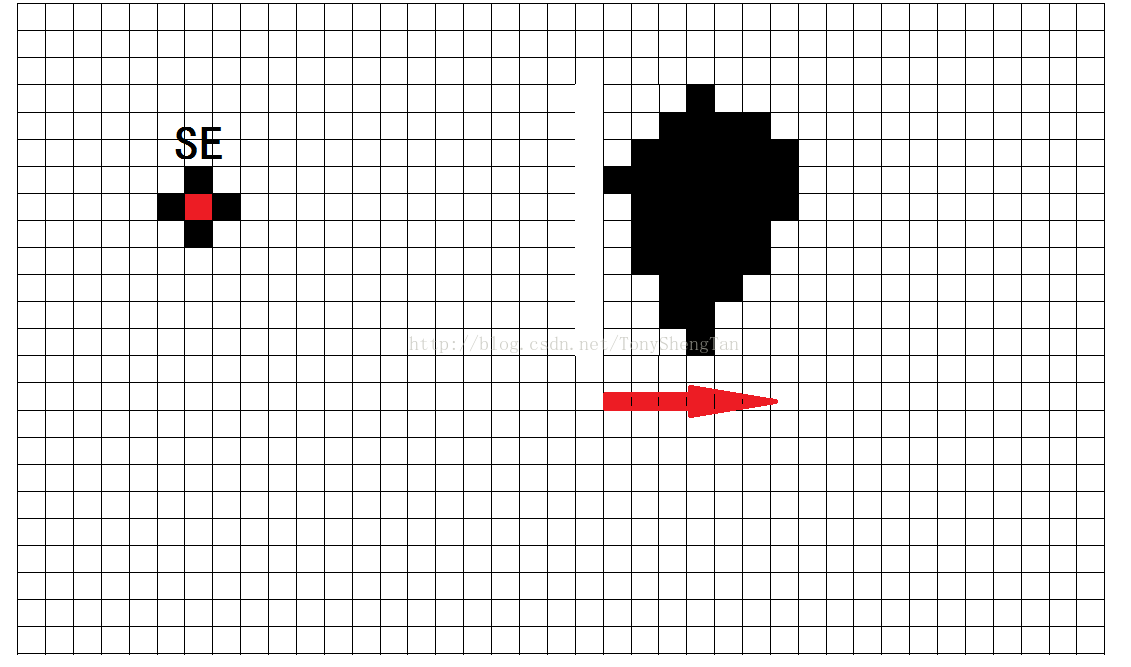
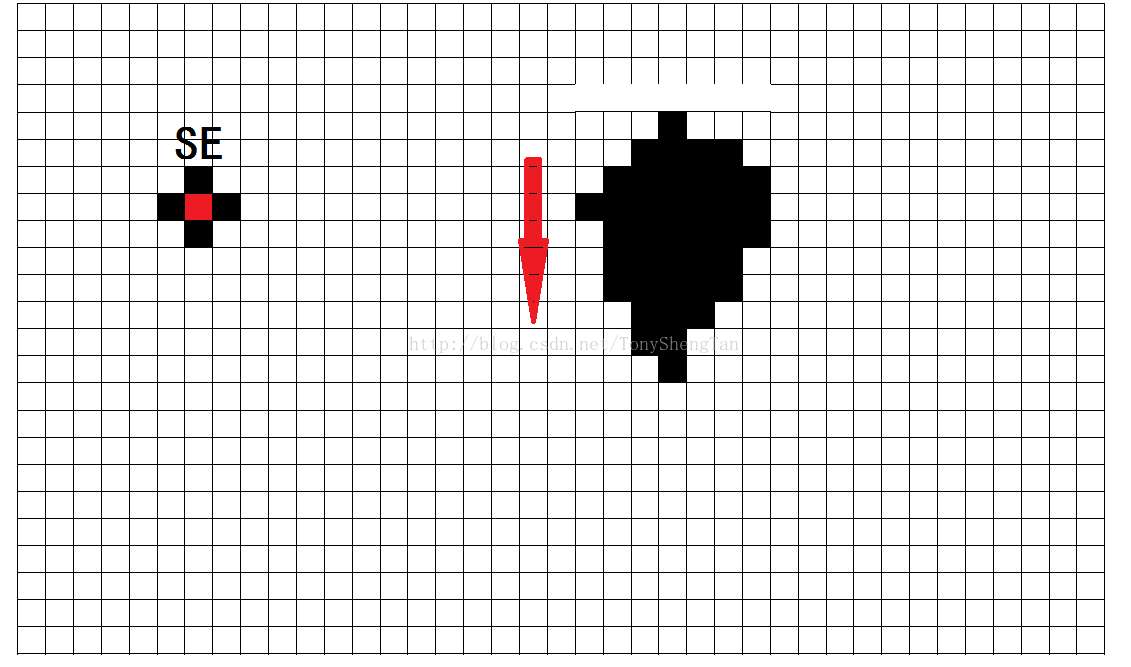
STEP4:SE显示,集合X需要向上移1个单位。
STEP5:SE显示,集合X需要向下移1个单位。
STEP last:将所有结果取并集,两种颜色的表示两种操作都能产生那个单元。黑色为原始集合。
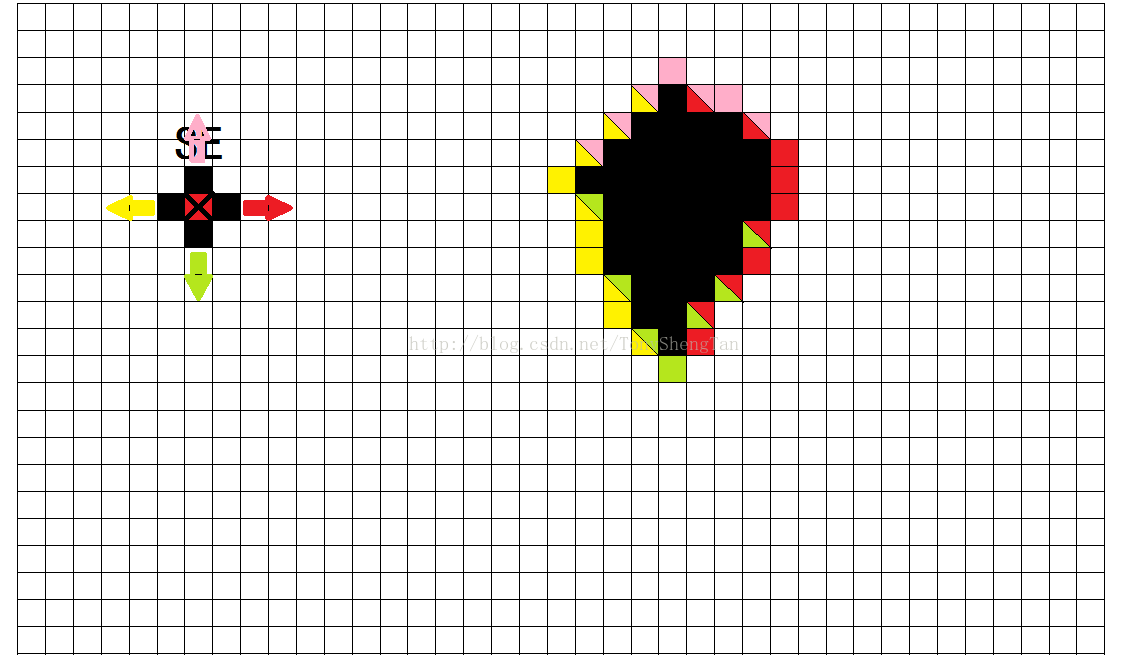
其实这种解释方法比SE滑过窗口的解释更加严谨,也更容易理解,其实SE滑过窗口的原理与着相同,只是用了类似分治的思想。但我实现起来好像两种方法的算法复杂度差不多。
说道复杂度,由于腐蚀和膨胀属于集合操作,所以,不属于线性操作。
腐蚀不是膨胀的逆操作,虽然有时可以经过腐蚀后膨胀来恢复原图,但他们并不是一对互逆的操作。其具有对偶性,后续介绍(因为数学公式不好输入)
腐蚀的具体操作与膨胀类似,但有以下不同:
首先,移动方向,与膨胀不同,如果SE为:
$$
\begin{bmatrix}
0&1&0\\
1&1&1\\
0&1&0
\end{bmatrix}
$$
红色为SE原点,那么绿色代表的位移不是向右移动而是向左移动,即为反方向。
上面数学基础中给出的腐蚀公式并不准确,IPAMV中给出了准确的公式,位移b前应有负号,即-b。
其次,集合操作是交集,这个很关键。
腐蚀和膨胀的性质
这一节先空着,因为公式不好输入,后续会填上。。敬请期待。(广告:本人找工作,211本科,14年毕业,无工作经验,爱好图像处理,有人要的话随时牵走,工作地点限深圳,联系方式:下面留言)。
代码
上代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
typedef int DataType;
struct Position_{
int x;
int y;
};
typedef struct Position_ Position;
typedef struct Position_ MoveDirection;
//位移操作,将图像整体移动,如果超出边界舍去
void Translation(IplImage *src,IplImage *dst,MoveDirection *direction){
int width=src->width;
int height=src->height;
//printf("%d,%d\n",direction->x,direction->y);
IplImage *temp=cvCreateImage(cvSize(width, height), src->depth, src->nChannels);
cvZero(temp);
for(int i=0;i<width;i++)
for(int j=0;j<height;j++){
if(j+direction->y<height &&
i+direction->x<width &&
j+direction->y>=0 &&
i+direction->x>=0 )
cvSetReal2D(temp, j+direction->y, i+direction->x, cvGetReal2D(src, j, i));
}
cvCopy(temp, dst, NULL);
cvReleaseImage(&temp);
}
//将小的图像弄到大的黑色图像中间,或者说是给图像加黑色边框
void Zoom(IplImage *src,IplImage *dst){
if(dst->width<src->width ||
dst->height<src->height ||
(dst->height-src->height)%2==1||
(dst->width-src->width)%2==1){
if(dst->width<src->width )
printf("Zoom wrong:dst's width too small!\n");
if(dst->height<src->height )
printf("Zoom wrong:dst's height too small!\n");
if((dst->height-src->height)%2==1||(dst->width-src->width)%2==1)
printf("Zoom wrong:dst-src not a oushu!\n");
exit(0);
}
MoveDirection m;
m.x=(dst->width-src->width)/2;
m.y=(dst->height-src->height)/2;
cvZero(dst);
for(int i=m.x,j=0;j<src->width;i++,j++){
for(int k=m.y,n=0;n<src->height;k++,n++){
cvSetReal2D(dst, k, i, cvGetReal2D(src, n, j));
}
}
}
//逻辑与操作
void And(IplImage *src0,IplImage *src1,IplImage *dst){
if(!isSIZEEQU(src0,src1)){
printf("And wrong !\n");
exit(0);
}
if(!isSIZEEQU(src0,dst)){
printf("And wrong !\n");
exit(0);
}
int width=src0->width;
int height=src0->height;
for(int i=0;i<width;i++){
for(int j=0;j<height;j++){
if(cvGetReal2D(src0, j, i)>100.0&&
cvGetReal2D(src1, j, i)>100.0)
cvSetReal2D(dst, j, i, 255.0);
else
cvSetReal2D(dst, j, i, 0.0);
}
}
}
//逻辑或操作
void Or(IplImage *src0,IplImage *src1,IplImage *dst){
if(!isSIZEEQU(src0,src1)){
printf("And wrong !\n");
exit(0);
}
if(!isSIZEEQU(src0,dst)){
printf("And wrong !\n");
exit(0);
}
int width=src0->width;
int height=src0->height;
for(int i=0;i<width;i++){
for(int j=0;j<height;j++){
if(cvGetReal2D(src0, j, i)>100.0||
cvGetReal2D(src1, j, i)>100.0)
cvSetReal2D(dst, j, i, 255);
}
}
}
//将所有元素设为1
void One(IplImage *src){
for(int i=0;i<src->width;i++)
for(int j=0;j<src->height;j++)
cvSetReal2D(src, j, i, 255.0);
}
//膨胀
void Dilate(IplImage *src,IplImage *dst,IplImage *se,Position *center){
if(center==NULL){
Position temp;
temp.x=se->width/2;
temp.y=se->height/2;
center=&temp;
}
//printf("%d,%d",center->x,center->y);
MoveDirection m;
IplImage *temp=cvCreateImage(cvGetSize(dst), dst->depth,dst->nChannels);
IplImage *tempdst=cvCreateImage(cvGetSize(dst), dst->depth,dst->nChannels);
IplImage *realdst=cvCreateImage(cvGetSize(dst), dst->depth,dst->nChannels);
cvZero(realdst);
Zoom(src,temp);
int width=se->width;
int height=se->height;
for(int i=0;i<width;i++){
for(int j=0;j<height;j++){
if(cvGetReal2D(se, j, i)>100.0){
m.x=i-center->x;
m.y=j-center->y;
Translation(temp,tempdst, &m);
Or(tempdst, realdst, realdst);
}
}
}
cvCopy(realdst, dst, NULL);
cvReleaseImage(&temp);
cvReleaseImage(&realdst);
cvReleaseImage(&tempdst);
}
//腐蚀
void Erode(IplImage *src,IplImage *dst,IplImage *se,Position *center){
if(center==NULL){
Position temp;
temp.x=se->width/2;
temp.y=se->height/2;
center=&temp;
}
MoveDirection m;
IplImage *temp=cvCreateImage(cvGetSize(dst), dst->depth,dst->nChannels);
IplImage *tempdst=cvCreateImage(cvGetSize(dst), dst->depth,dst->nChannels);
IplImage *realdst=cvCreateImage(cvGetSize(dst), dst->depth,dst->nChannels);
One(realdst);
Zoom(src,temp);
int width=se->width;
int height=se->height;
for(int i=0;i<width;i++){
for(int j=0;j<height;j++){
if(cvGetReal2D(se, j, i)>100.0){
m.x=center->x-i;
m.y=center->y-j;
Translation(temp,tempdst, &m);
And(tempdst, realdst, realdst);
}
}
}
cvCopy(realdst, dst, NULL);
cvReleaseImage(&tempdst);
cvReleaseImage(&temp);
cvReleaseImage(&realdst);
}
//开操作
void Open(IplImage *src,IplImage *dst,IplImage *se,Position *center){
Erode(src, dst, se, center);
Dilate(dst, dst, se, center);
}
//关操作
void Close(IplImage *src,IplImage *dst,IplImage *se,Position *center){
Dilate(src, dst, se, center);
Erode(dst, dst, se, center);
}
int main(){
IplImage *se=cvLoadImage("/Users/Tony/Binary_Image/mask6.jpg",0);
IplImage *src=cvLoadImage("/Users/Tony/lena/lena_BW.jpg", 0);
IplImage *dst=cvCreateImage(cvGetSize(src), 8, 1);
IplImage *subdst=cvCreateImage(cvGetSize(src), 8, 1);
Close(src, dst, se, NULL);
cvSub(dst,src,subdst, NULL);
cvNamedWindow("SRC", 1);
cvShowImage("SRC", src);
cvNamedWindow("DST", 1);
cvShowImage("DST", dst);
cvNamedWindow("SUB", 1);
cvShowImage("SUB", subdst);
cvSaveImage("/Users/Tony/Binary_Image/lena_close_sub.jpg", subdst, 0);
cvSaveImage("/Users/Tony/Binary_Image/lena_close.jpg", dst, 0);
cvWaitKey(0);
return 0;
}
结果
膨胀:第一行SE各向同性,后两行SE各向异性
膨胀结果,结构元,与原图的差
腐蚀:第一行SE各向同性,后两行SE各向异性
腐蚀结果,结构元,原图的差
同一结构元不同中心位置的不同结果: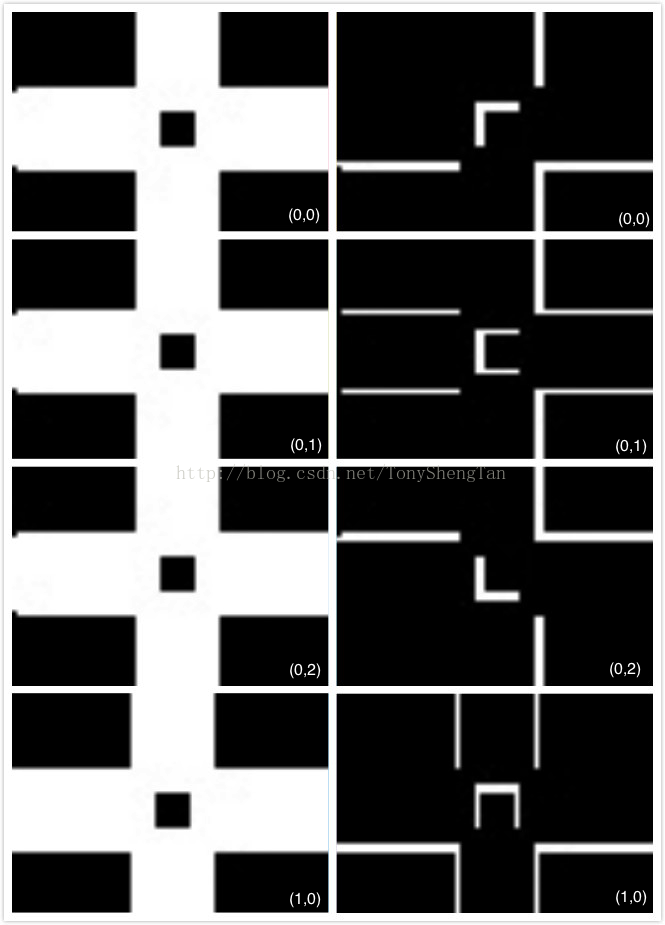
结构元为简单,各向同性:
$$
\begin{bmatrix}
0&1&0\\
1&1&1\\
0&1&0
\end{bmatrix}
$$
实际中的应用,lena图,灰度图100为阈值后的二值图:
原图
腐蚀与原图的差,膨胀与原图的差