
Abstract: 数字图像处理:第42天
Keywords: 边缘检测,Sobel算子
本文最初发表于csdn,于2018年2月17日迁移至此
开篇废话
废话开始,Sobel我们并不陌生,之前在图像增强的时候也已经介绍了它的作用,并且还杜撰了一下它的来历,也就是用Robert平移相加(类似于相关或卷积),下面可以给出Sobel的另一个来源,因为Sobel数学推导的过程和资料很少,而且当时提出Sobel的时候应该也是没有数学论证的,而只是简单的实验后,发现效果非常好。
我们还要介绍下扩展Sobel算子,Sobel原始模型为标准3x3模板,但可以扩展成5x5到任意奇数x奇数的大小,而模板系数的确定可以根据帕斯卡三角来计算,真的很神奇。Sobel之后延伸出了Scharr算子,这个算子也为3x3算子,但是效果据说比3x3的Sobel好,后面文章将会给出具体对比。
算子形式
数学形式的标准Sobel为: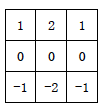
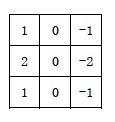
此模板为最早提出的Sobel模板,由于模板的对称性,我们可以将它分解一下,并根据卷积的运算性质,可以得到: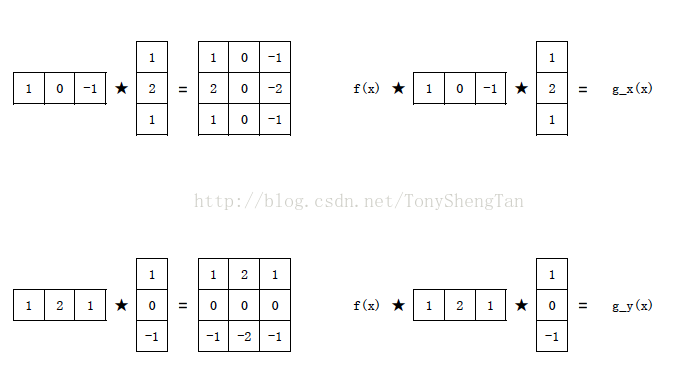
也就是说,图像对Sobel 的响应等于,对模板分解后的小模板分别卷积,而观察小模板我们可以发现,其中 $[1,0,-1]$ 或其转置为差分,也就是用于寻找边缘候选点的,而另一个 $[1,2,1]$ 是一个标准平滑算子,这也就是很多书上说,Sobel具有平滑和微分的功效,原因就是这里了,也就是说,算子先将图像横向或纵向平滑,然后再纵向或横向差分,得到的结果是平滑后的差分结果。
或者,也可根据以下方式得到分解到的两个模板,其中星号表示卷积: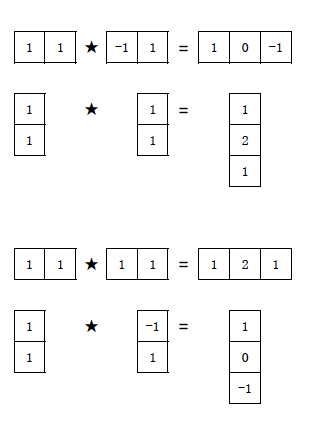
另一种得到模板的方法是通过帕斯卡三角,得到,并且帕斯卡三角的奇数行是最有高斯模板的整数系数的逼近,也就是说,高斯模板可以通过帕斯卡三角查询到其整数系数的近似,来观察帕斯卡三角: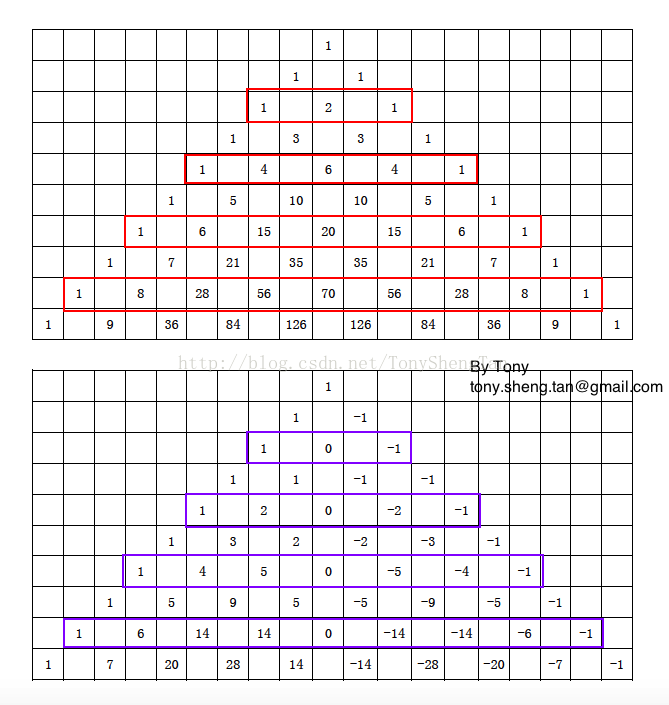
其中标注的就可以用来生成扩展的Sobel算子,其中较常用的有5x5和7x7的模板。
用两个小模板分别卷积的另一个好处是减少计算量,对于使用大小为nxn的模板,卷积计算量为 $O(nnwidthheight$ 而分开成小模板卷积计算量是 $O(2nwidthheight$ 也就是 $O(nwidthheight$ 减少了一项,当n相对较大的时候,计算量明显减少。
帕斯卡三角的计算是通过组合公式给出,具体不在这里描述,所以Sobel算子的模板计算方法我们就有了大概的了解。
opencv文档中给出了关于sobel算子的下面信息: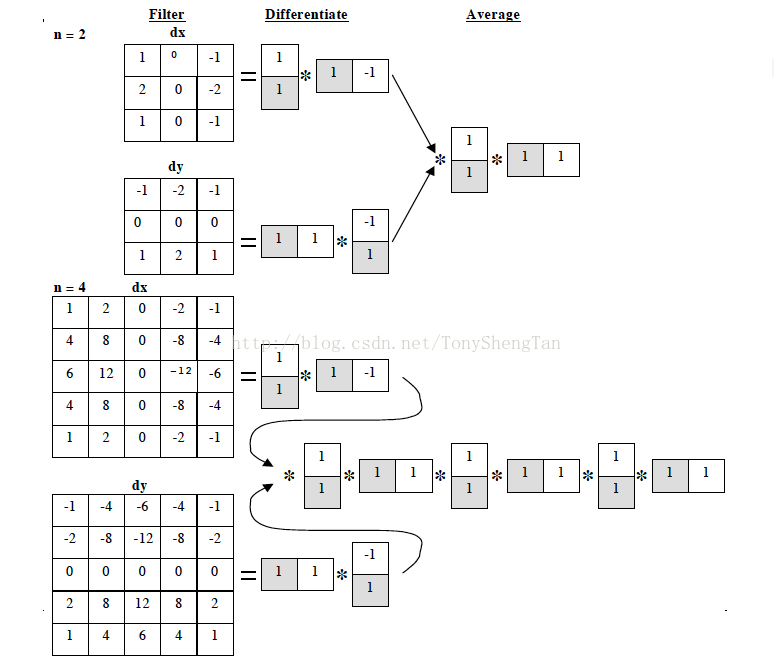
和上面描述的方法类似,更直观,可以用来理解sobel的模板结构,不同的差分方向带来的问题就是边缘方向的确定,由于算子属于一阶微分,也就是梯度算子之一,所以梯度方向信息也显得很重要,比如后面要说的canny就是用到了梯度方向的信息,所以,在确定方向时要注意算子的差分方向。
对于阶梯型边缘,计算过程及结果如下,红色为模板中心: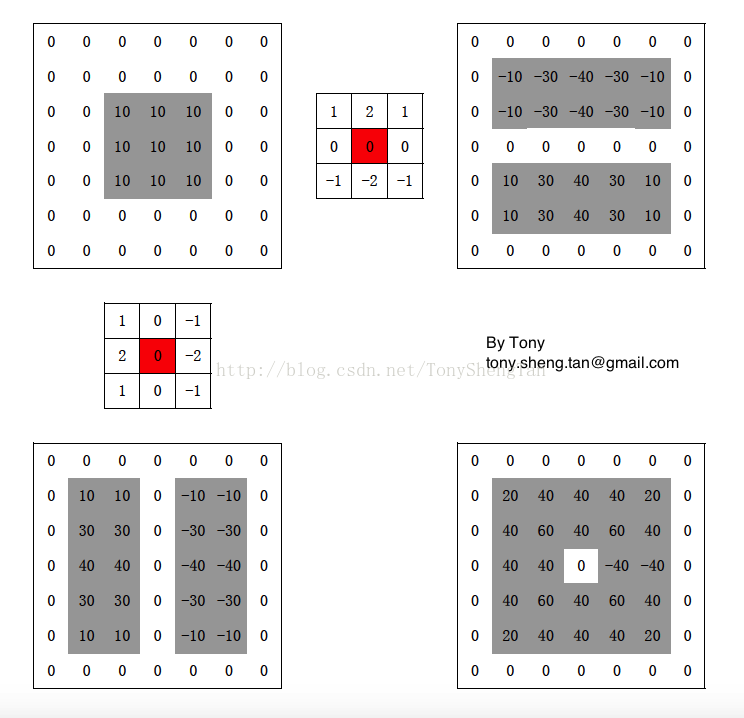
可以看到,相比于Robert算子,Sobel得到的边界候选位置相对较宽,而且包括全部的内边界和外边界。并且差分被放大了,也就是说,用Sobel算子处理后的图片有可能超过原图像灰度级别,对于这个问题,处理方法是将平滑分算子(分解后的平滑部分,例如【1,2,1】)归一化,得到的差值仍在原始灰度级范围内。
代码效果
代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42double Sobel(double *src,double *dst,double *edgedriction,int width,int height,int sobel_size){
//double SobelMask_x[3]={-1,-2,-1,0,0,0,1,2,1};
double *dst_x=(double *)malloc(sizeof(double)*width*height);
double *dst_y=(double *)malloc(sizeof(double)*width*height);
if(sobel_size==3){
double SobelMask1[3]={0.25,0.5,0.25};
double SobelMask2[3]={1,0,-1};
RealConvolution(src, dst_x, SobelMask1, width, height, 1, 3);
RealConvolution(dst_x, dst_x, SobelMask2, width, height, 3, 1);
RealConvolution(src, dst_y, SobelMask2, width, height, 1, 3);
RealConvolution(dst_y, dst_y, SobelMask1, width, height, 3, 1);
}else if(sobel_size==5){
double SobelMask1[5]={0.0625,0.25,0.375,0.25,0.0625};
double SobelMask2[5]={1/3.0,2/3.0,0,-2/3.0,-1/3.0};
RealConvolution(src, dst_x, SobelMask1, width, height, 1, 5);
RealConvolution(dst_x, dst_x, SobelMask2, width, height, 5, 1);
RealConvolution(src, dst_y, SobelMask2, width, height, 1, 5);
RealConvolution(dst_y, dst_y, SobelMask1, width, height, 5, 1);
}else if(sobel_size==7){
double SobelMask1[7]={0.015625,0.09375,0.234375,0.3125,0.234375,0.09375,0.015625};
double SobelMask2[7]={0.1,0.4,0.5,0,-0.5,-0.4,-0.1};
RealConvolution(src, dst_x, SobelMask1, width, height, 1, 7);
RealConvolution(dst_x, dst_x, SobelMask2, width, height, 7, 1);
RealConvolution(src, dst_y, SobelMask2, width, height, 1, 7);
RealConvolution(dst_y, dst_y, SobelMask1, width, height, 7, 1);
}
if(edgedriction!=NULL)
//getEdgeDirection(dst_x, dst_y, edgedriction, width, height);
getEdgeAngle(dst_x, dst_y, edgedriction, width, height);
for(int j=0;j<height;j++)
for(int i=0;i<width;i++){
dst[j*width+i]=abs(dst_x[j*width+i])+abs(dst_y[j*width+i]);
}
free(dst_x);
free(dst_y);
return findMatrixMax(dst,width,height);
}
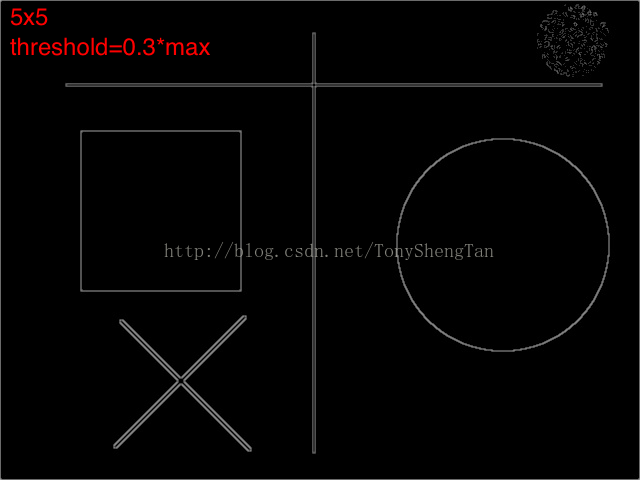
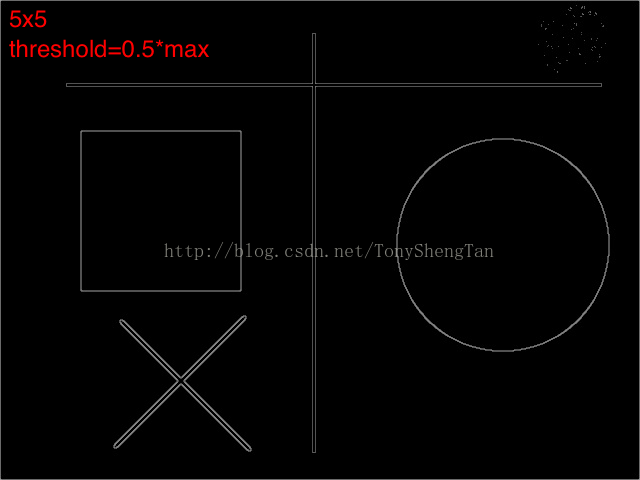
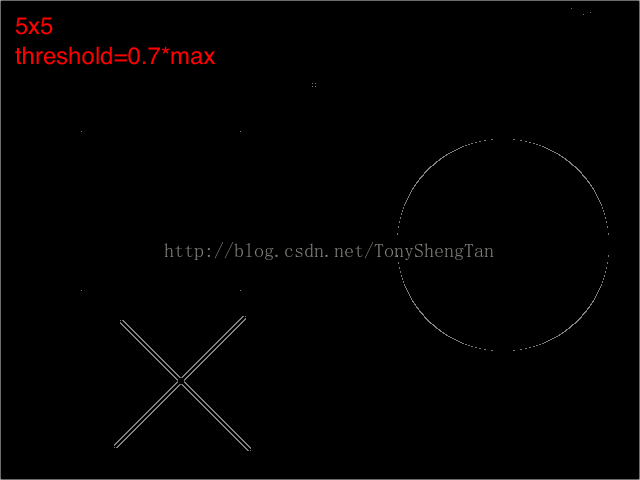
下面对比3x3,5x5,7x7算子的效果:
原图: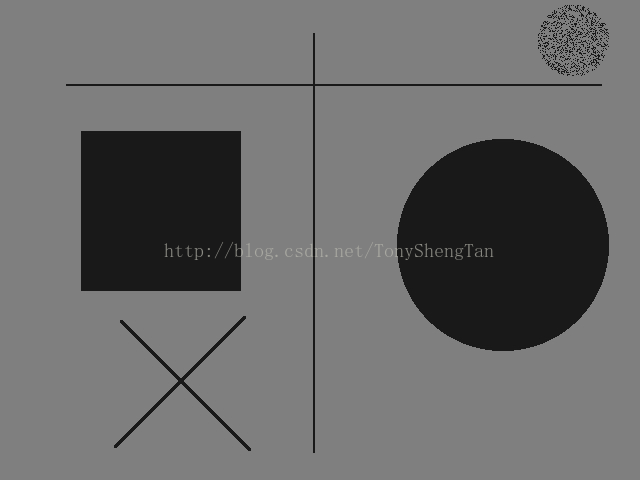
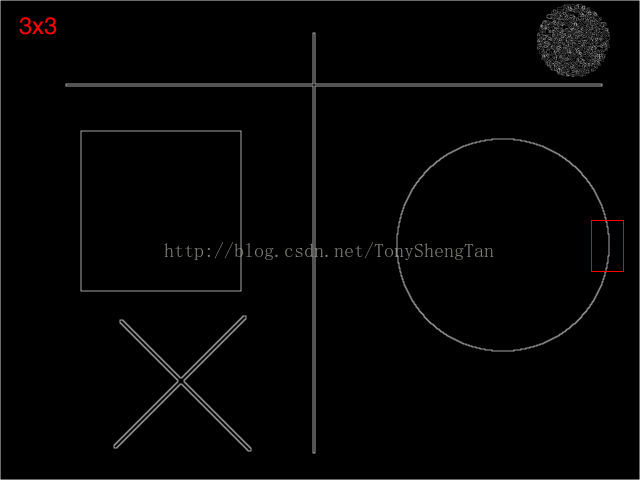
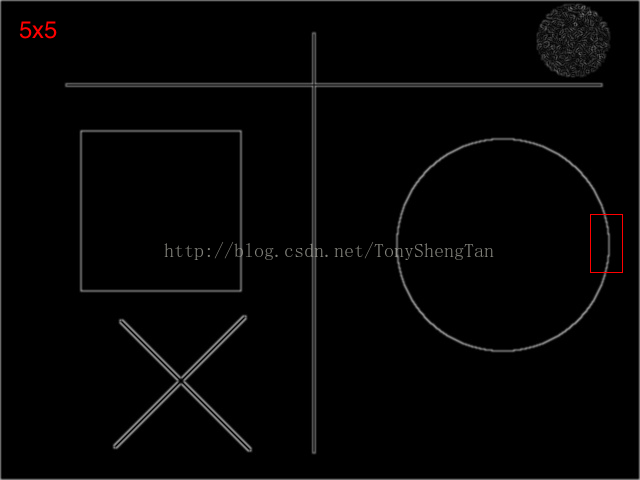
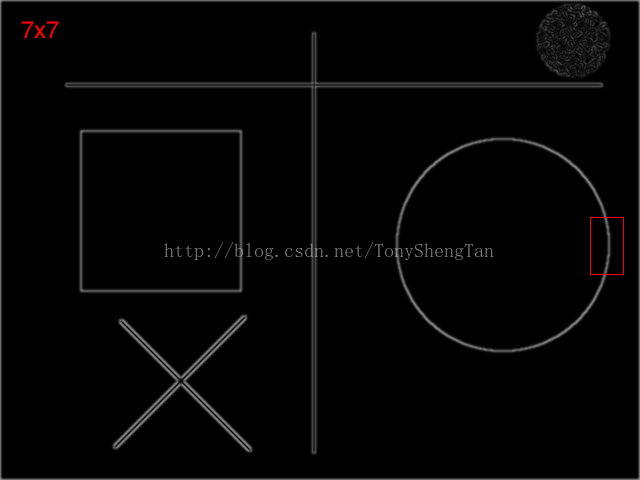
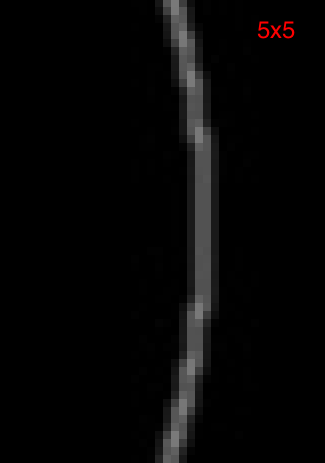
局部放大:
阈值后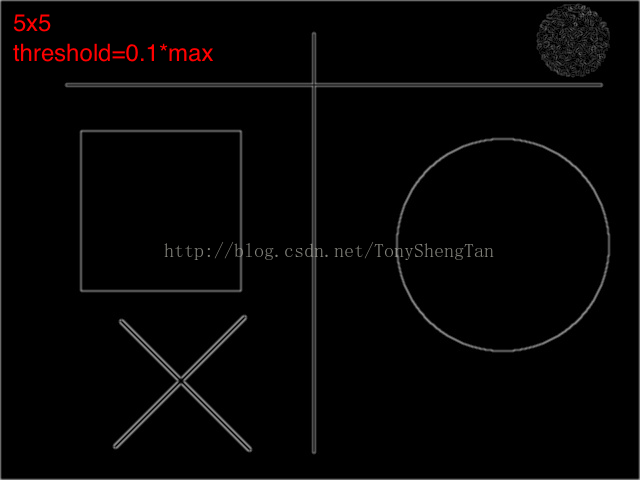
结论
Sobel算子的效果相比于其他算子,效果较好,而且计算量不大,可以用于实时系统,其结合简单的阈值可以得到较好的效果,但得到的边缘较宽,可以使用形态学细化。
待续。。。。